计算机视觉:绪论
分享
点赞
3
收藏
1
下载 0
-
快召唤伙伴们来围观吧
-
微博
QQ
QQ空间
贴吧
-
文档嵌入链接
- <iframe src="https://www.slidestalk.com/u181/computer_vision_ustc01_introduction?embed" frame border="0" width="640" height="360" scrolling="no" allowfullscreen="true">复制
-
-
微信扫一扫分享
-
已成功复制到剪贴板
 有只羊
有只羊
/
发布于
6年前
/
2023
人观看
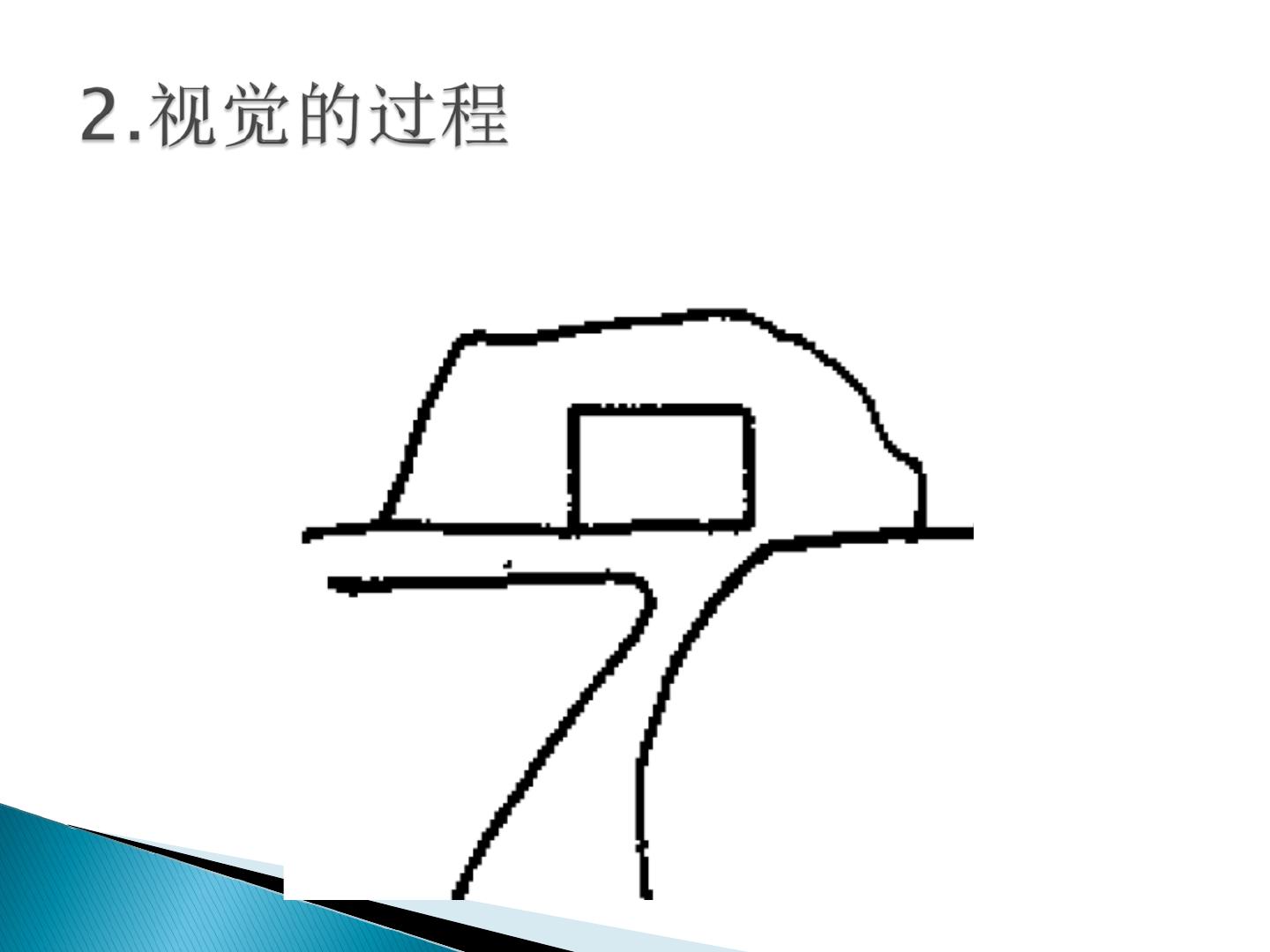
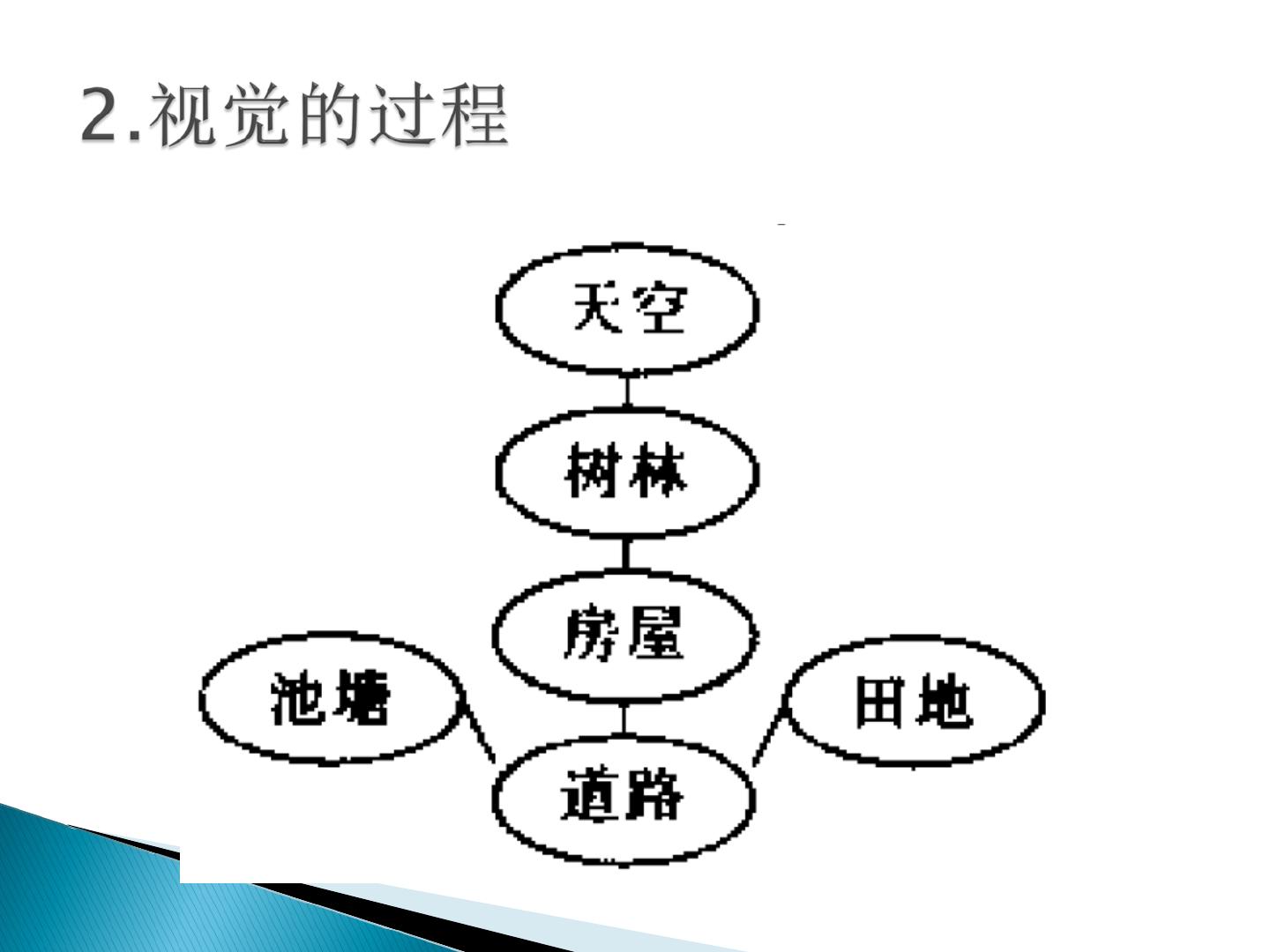
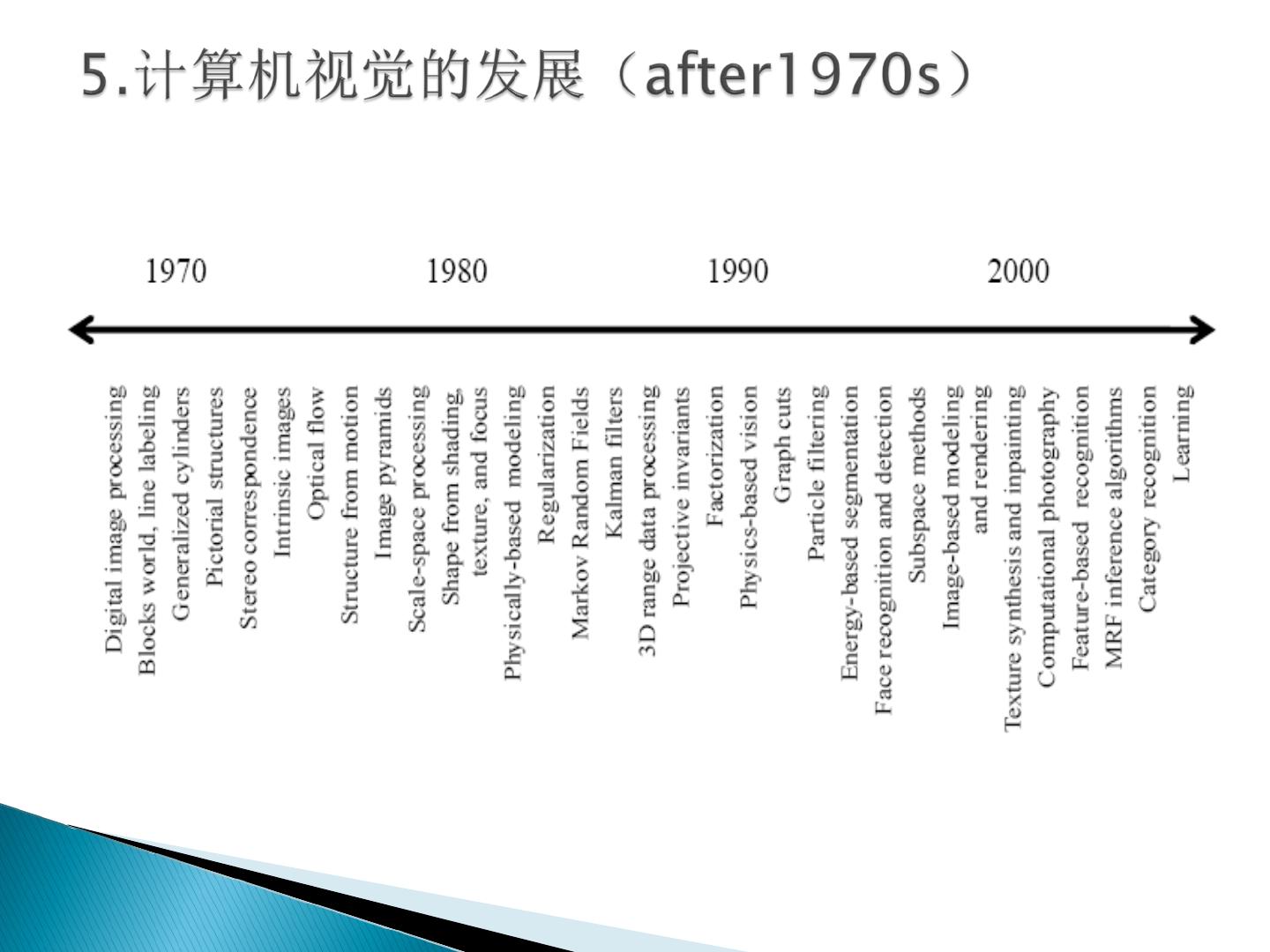
这是一套来自中国科学技术大学用于计算机视觉教学的slides,本课程设置分为四个层次:视觉基础、底层处理、中层处理、高层处理。计算机视觉对智能机器的发展来讲十分重要,本学科通过研究用计算机来模拟生物外显或宏观视觉功能从而用图像创建或恢复现实世界模型,然后认知现实世界。本章首先介绍了人类视觉的形成通过特征提取和区域分割、建模与模式表达、描述和理解三个过程实现,并介绍了计算机视觉的研究方向:输入设备的研制、对输入的原始图形进行预处理等,计算机视觉的发展历程及应用。
展开查看详情
2 . 主讲: 曹洋
forrest@ustc.edu.cn
办公室:科技楼西楼 303
�
3 .课程教材:
使用教材:
Richard Szeliski , Computer Vision: Algorithms and
Applications , Springer , 2010
参考教材:
David A. Forsyth, Jean Ponce 著,计算机视觉(一种现
代方法),电子工业出版社 2004 。
课程主页:
待定
�
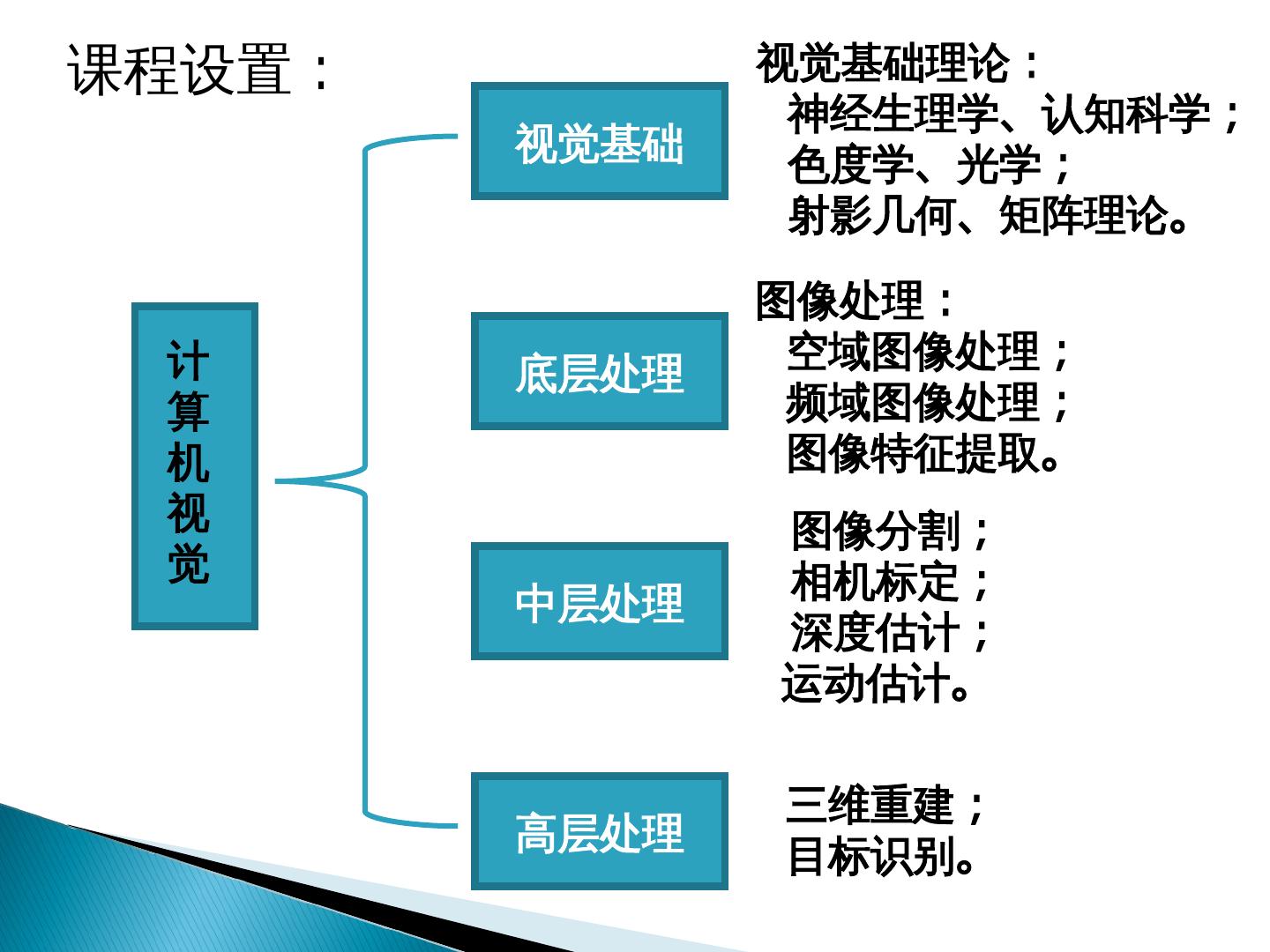
5 .课程设置: 视觉基础理论:
神经生理学、认知科学;
视觉基础 色度学、光学;
射影几何、矩阵理论。
图像处理:
计 空域图像处理;
底层处理
算 频域图像处理;
机 图像特征提取。
视 图像分割;
觉 相机标定;
中层处理
深度估计;
运动估计。
三维重建;
高层处理
目标识别。
�
6 . Week 1 绪论
(2.27 , 3.2)
(5 lectures) 视觉基本特性 I
生物特性
Week 2 视觉基本特性 II
( 3.6 , 3. 物理特性
9)
(5 lectures) 视觉基本特性 III
几何特性
Week 3 图像处理基础 I
( 3.13 , 3.1 空域处理
6)
(5 lectures) 图像处理基础 II
频域处理
Week 4 特征提取 I
( 3.20 , 3.2 点特征
3)
�
7 . Week 5 图像分割 I
( 3.27 , 3.3 主动轮廓线
0)
(5 lectures) 图像分割 II
Mean shift
Week 6 图像对准
( 4.3 , 4.
8)
(5 lectures) 摄像机标定
Week 7 单幅图像深度估
( 4.10 , 4.1 计 I
3)
(5 lectures) 单幅图像深度估
计 II
Week 8 运动估计深度 I
( 4.17 , 4.2
0)
�
8 . Week
3.20 9
4.17 立体视觉深度估
图像分割
引言 I
(
(34.24
(3 , 4.2 计
lectures)
lectures) 主动轮廓线
7)
4.19
3.22 图像分割
视觉基本特性II I
(2
(5 lectures) 测距成像系统
(2 lectures) 生物特性
Mean shift
Week
3.2710
4.24 劳动节放假
图像对准
视觉基本特性 II
( lectures)
(3
(3 5.1 , 5.
lectures) 物理特性
4)
4.26
3.29 摄像机标定
视觉基本特性 III
(5
(2 lectures)
(2 lectures) 三维重建
几何特性 I
5.1
4.3 劳动节放假
图像处理基础 I
(3
(3Week
lectures)
lectures)
11 三维重建
空域处理 II
( 5.85.3, 5.1
4.5 运动估计
图像处理基础 I II
(2 1)
(2 lectures)
lectures) 频域处理
(5 lectures)
4.10
5.8 目标识别
特征提取 I III
运动估计
(3Week
lectures)
12 目标识别
点特征 II
( 5.15 , 5.1 稠密运动估计
5.10
4.12 特征提取 II
(2 8 )
(2 lectures)
lectures) 光流
边缘及线特征
(5 lectures) 布置作业
�
9 .考 阅读报告:两人一组,从 30 篇计算机视
核 觉的经典文献中挑选一篇阅读,并提交
方 一份阅读报告及 PPT 。
式 项目报告: 2-4 人一组,从五个候选项
目中任选一个,实现并提交项目报告以
及源代码。
�
12 . 智能机器:能够模拟人类的功能,感知外部世界并
有效解决人所能解决问题的系统。
在人类的感知器官中,视觉获取的信息量最大,大
约 80% ,因此对于发展智能机器而言,赋予机器
以人类视觉功能是十分重要的。
计算机视觉:研究用计算机来模拟生物外显或宏观
视觉功能的技术学科。
计算机视觉的任务是用图像创建或恢复现实世界模
型,然后认知现实世界。
具体来说,让计算机具有对周围世界的空间物体进
行传感、抽象、判断的能力,从而达到识别、理解
的目的。
�
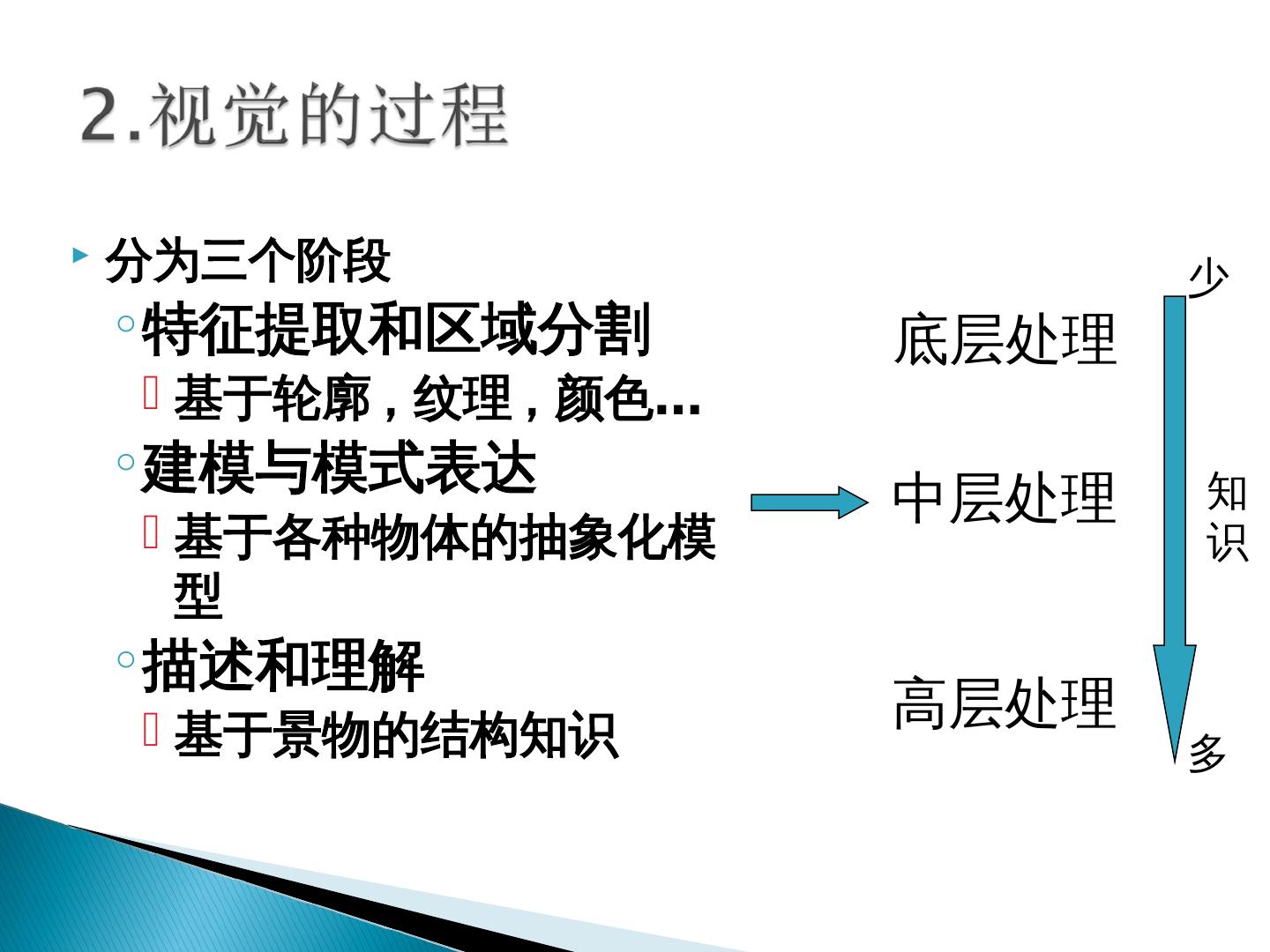
20 . 分为三个阶段 少
◦特征提取和区域分割 底层处理
基于轮廓 , 纹理 , 颜色…
◦建模与模式表达
中层处理 知
基于各种物体的抽象化模 识
型
◦描述和理解
基于景物的结构知识 高层处理
多
�
21 . 输入设备 (input device) 的研制 , 包括成像设
备和数字化设备.成象设备是指通过光学摄像机
或红外、激光、超声、 X 射线对周围场景或物体
进行探测成象,得到关于场景或物体的二维或三
维数字化图像.
对输入的原始图像进行预处理.这一过程借用了
大量的图像处理技术和算法,如图像滤波、图像
增强、边缘检测等,以便从图像中抽取诸如角点
、边缘、线条、边界以及色彩等关于场景的基本
特征;这一过程还包含了各种图像变换(如校
正)、图像纹理检测、图像运动检测等.
�
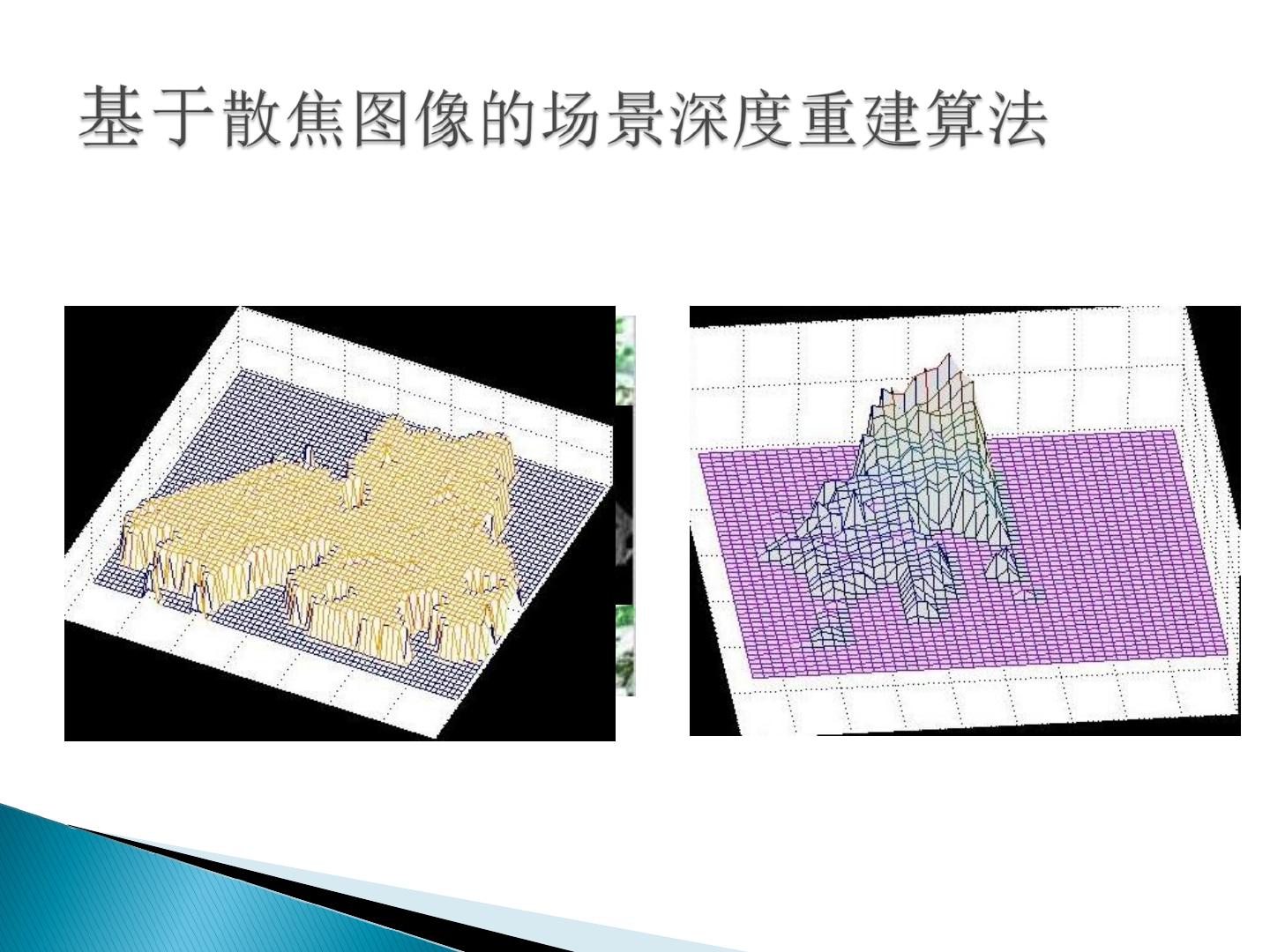
22 . 恢复场景的深度、表面法线方向、轮廓等有关场
景的 2.5 维信息 , 并在此基础上恢复物体的完整
三维图,建立物体三维描述 .
根据机器预先存贮的模型知识以及形状、色彩等
特征 , 对于图像中各种物体进行识别 , 确定它们
用于哪一类物体 .
建立各个图像中物体的拓扑关系图 , 给出图像所
反映景物的结构描述 .
体系结构( system architecture ) , 涉及
一系列相关的课题 , 并行结构、分层结构、信息
流结构、拓扑结构以及从设计到实现的途径.
�
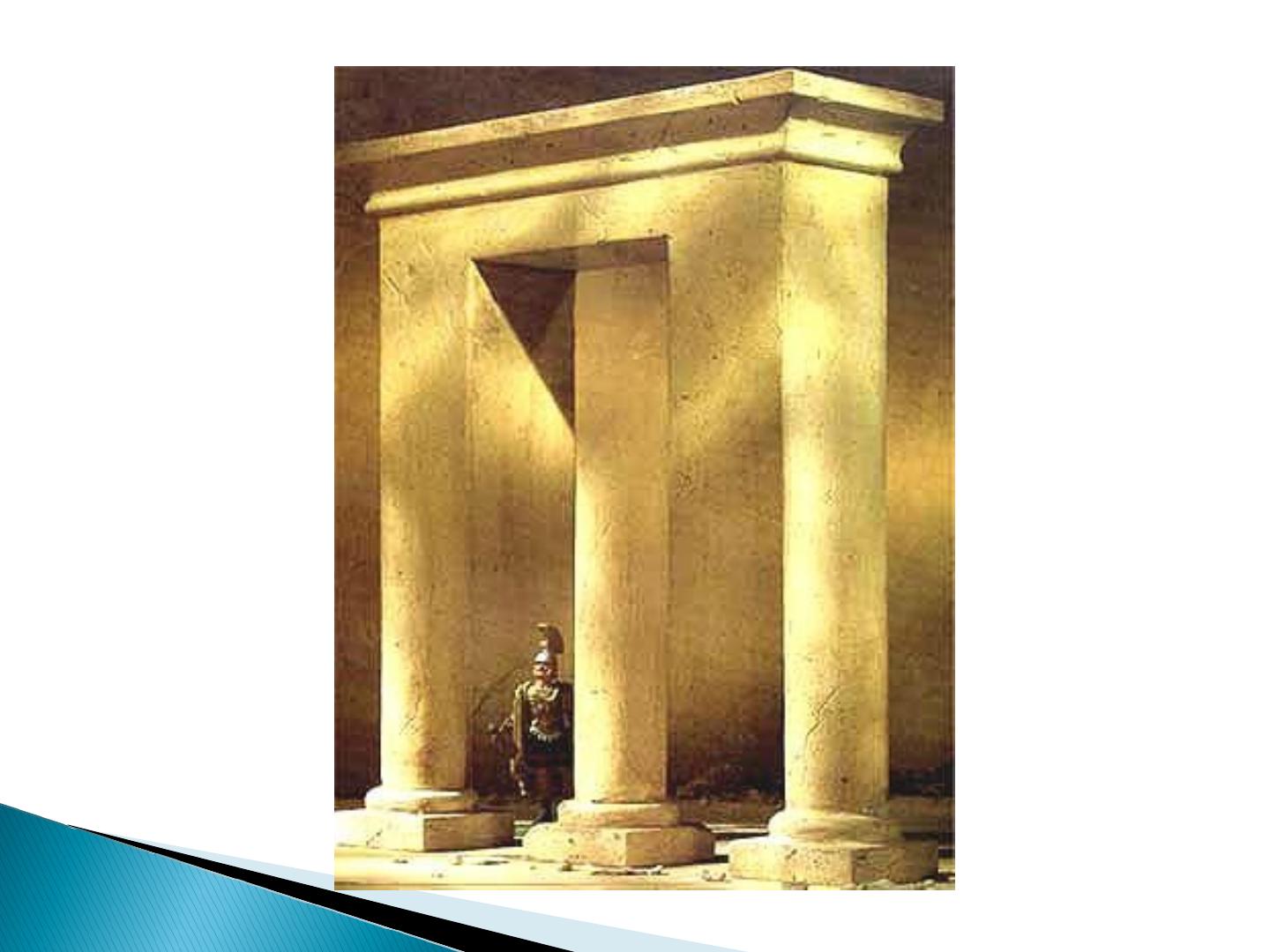
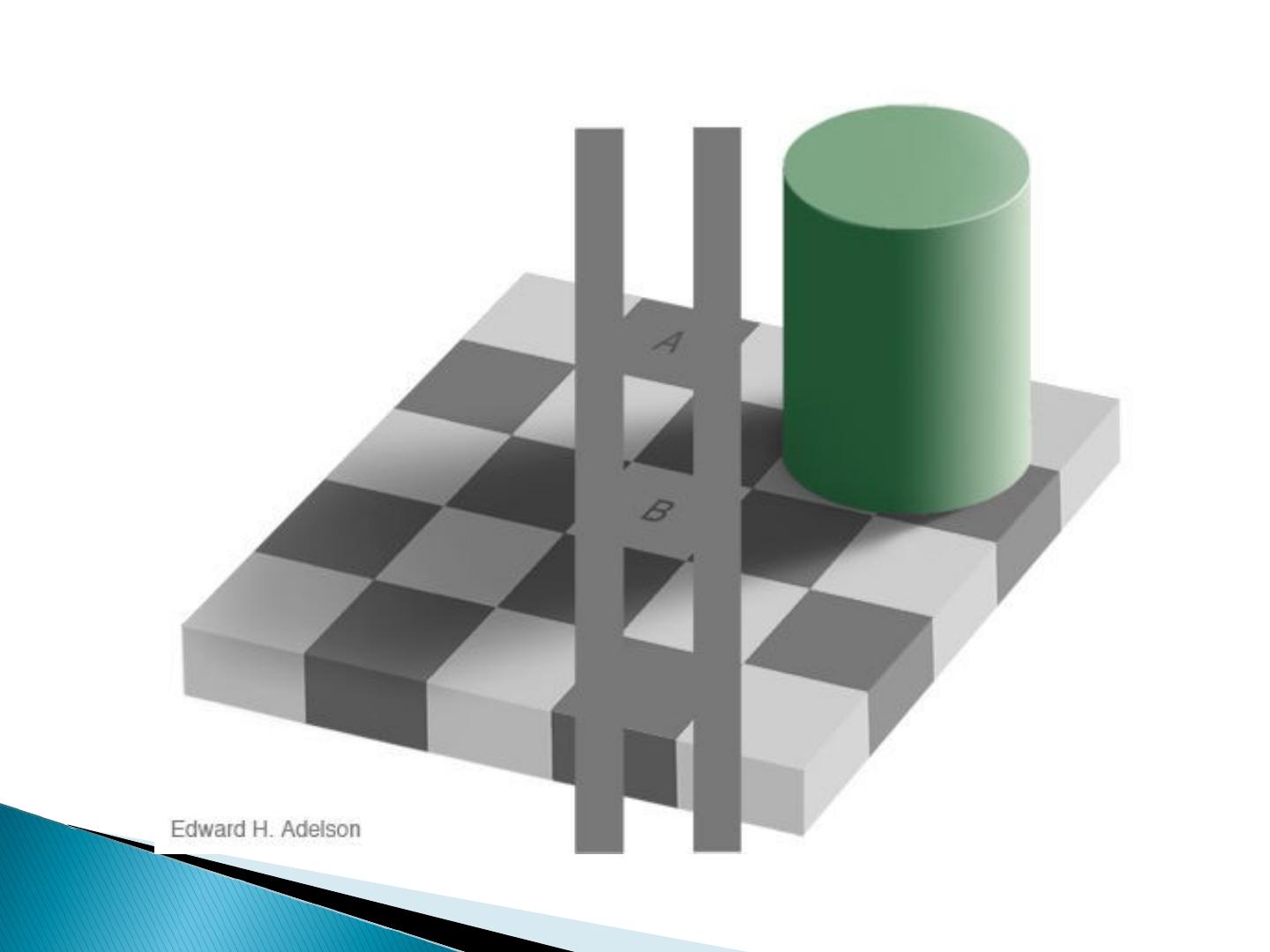
23 . 图像多义性: 三维场景被投影为二维图像,深度和不可
见部分的信息被丢失,因而会出现不同形状的三维物体投
影在图像平面上产生相同图像的问题.另外,在不同角度
获取同一物体的图像会有很大的差异.
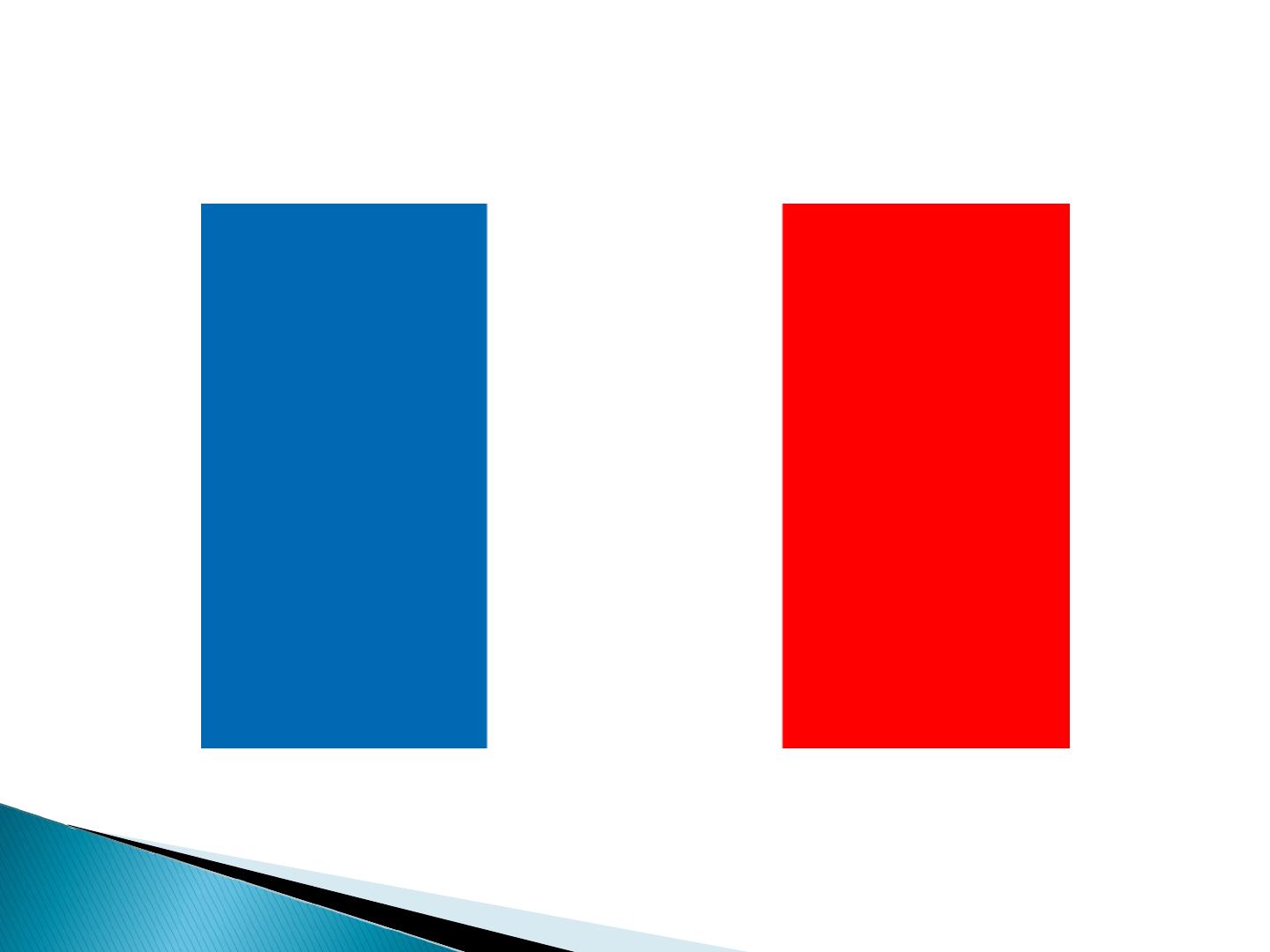
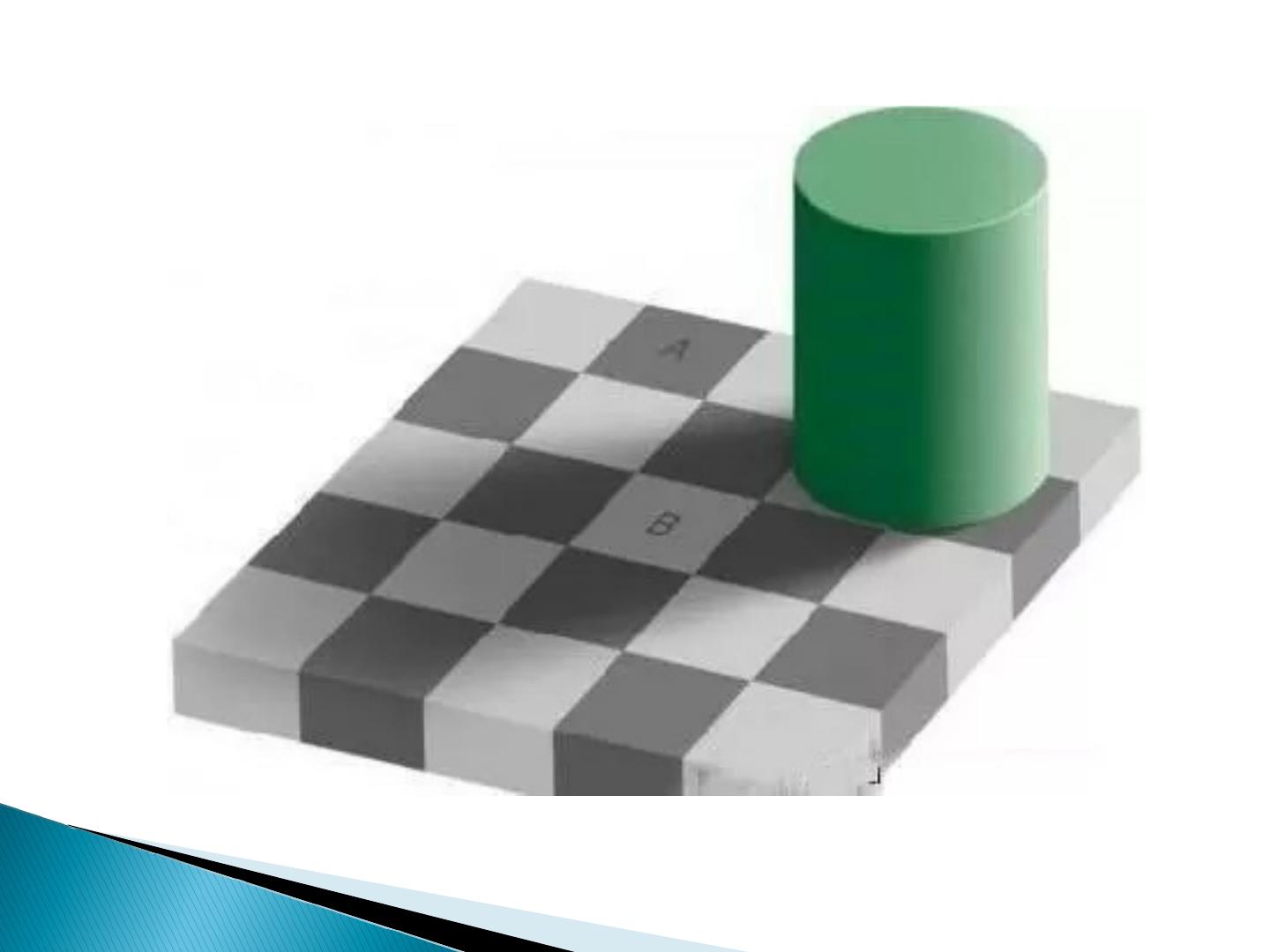
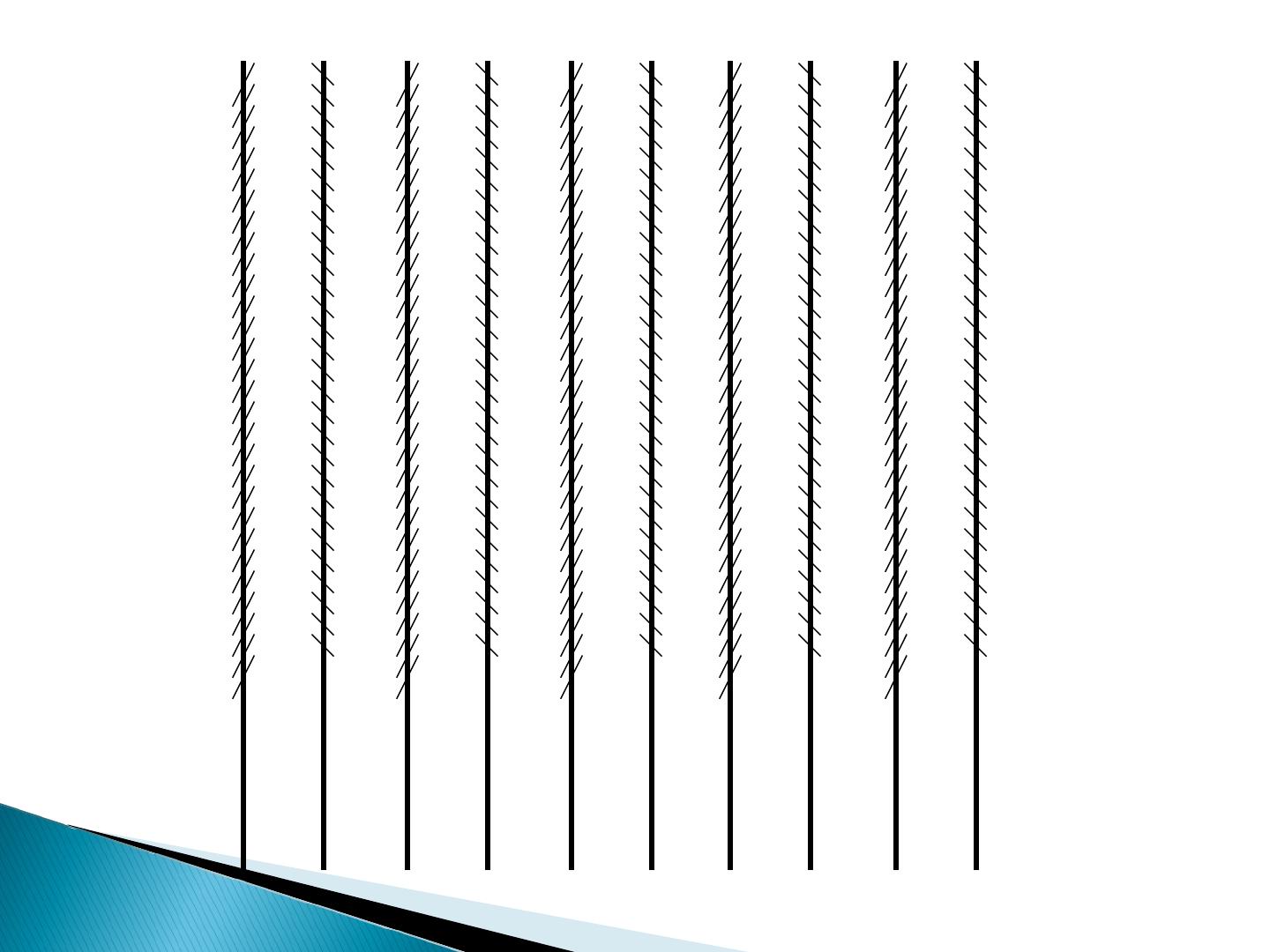
环境因素影响:场景中的诸多因素,包括照明、物体形状
、表面颜色、摄像机以及空间关系变化都会对成像有影
响.
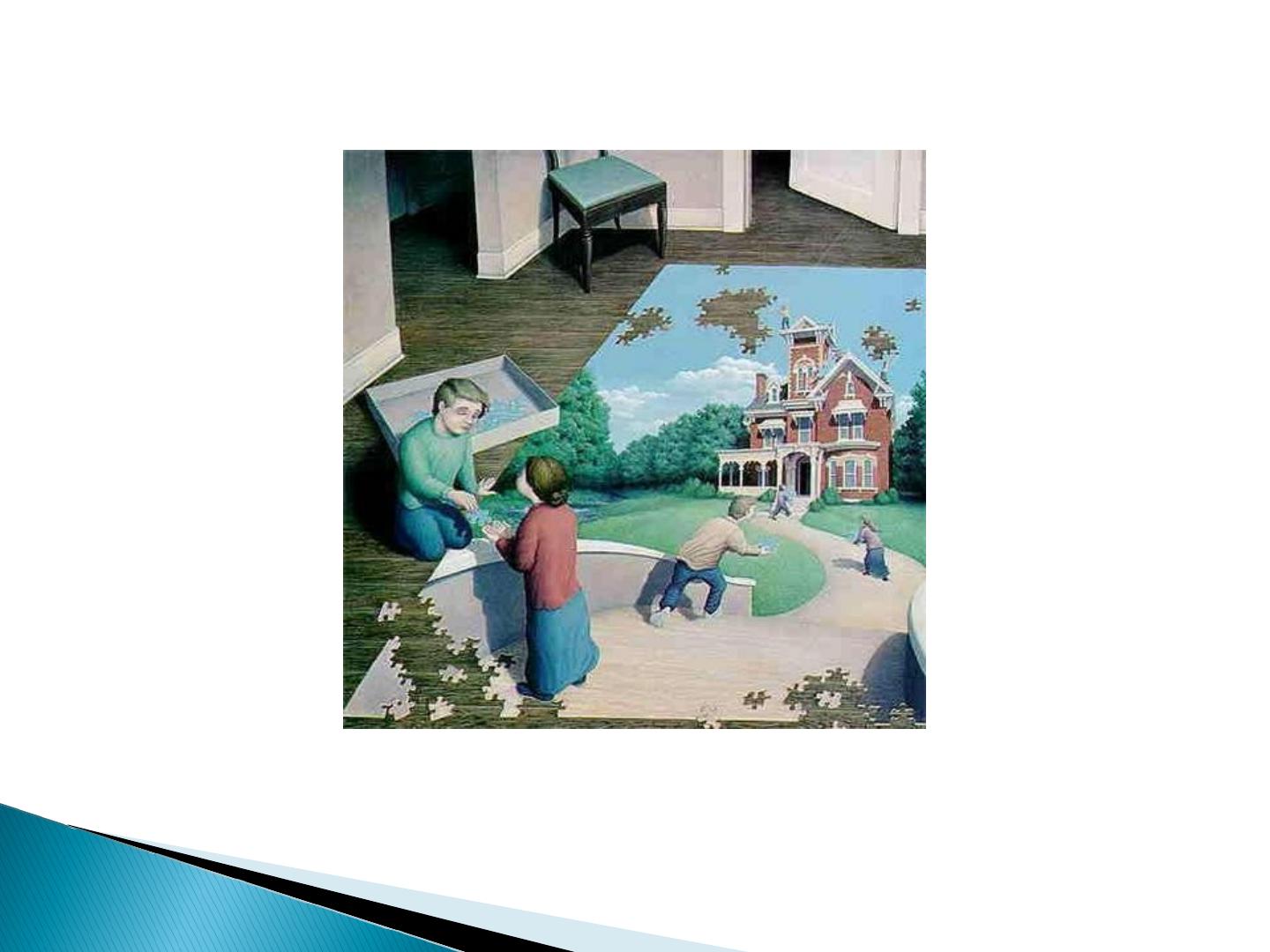
知识导引: 同样的图像在不同的知识导引下,将会产生
不同的识别结果.
大量数据: 灰度图像,彩色图像,深度图像的信息量十
分巨大,巨大的数据量需要很大的存贮空间,同时不易实
现快速处理.
�