







- 快召唤伙伴们来围观吧
- 微博 QQ QQ空间 贴吧
- 文档嵌入链接
- <iframe src="https://www.slidestalk.com/u3812/34_ServoSystems_ServoMotors?embed" frame border="0" width="640" height="360" scrolling="no" allowfullscreen="true">复制
- 微信扫一扫分享
34_ServoSystems, ServoMotors
点赞
6
收藏
2
下载 0
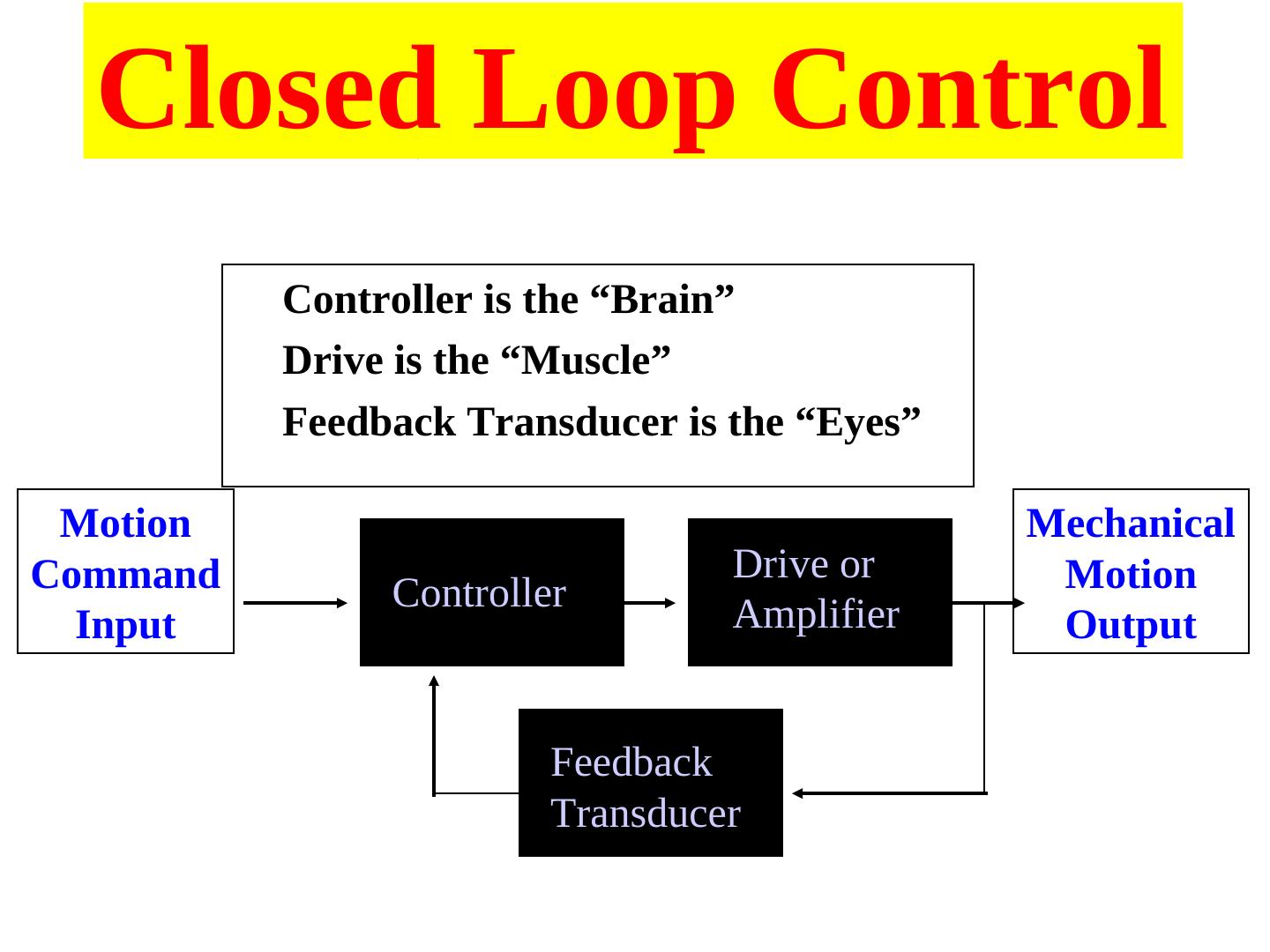
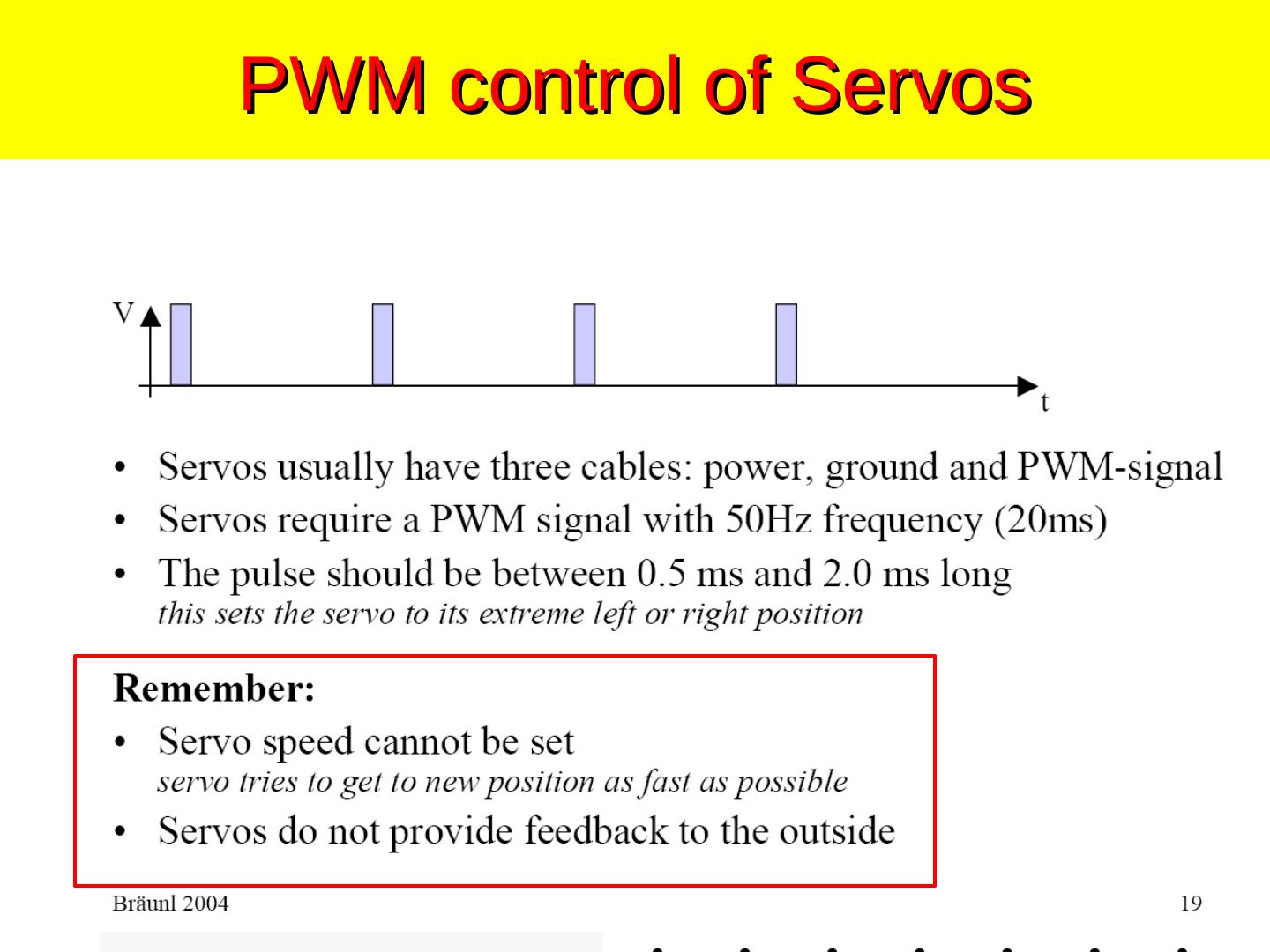
Servo is mechanism based on feedback control.
The controlled quantity is mechanical.
相关推荐

DolphinScheduler在铁骑力士集团的落地应用实践
DolphinScheduler社区
Apache DolphinScheduler发版流程与避坑指南
DolphinScheduler社区

Apache SeaTunnel 2.3.8版本更新抢先看!
SeaTunnel
轻松搭建云上数仓 - DolphinScheduler + Serverless Spark
DolphinScheduler社区
Apache DolphinScheduler在BMR中的实践
DolphinScheduler社区
agentUniverse X 浙大太乙平台,开源共建招募令来啦,3万奖金等你拿!
agentUniverse

开源之夏DolphinScheduler项目讲解-Apache Dolphinscheduler新增gRPC任务插件
DolphinScheduler社区

开源之夏2025 DolphinScheduler项目讲解-k8s任务链接优化课题
DolphinScheduler社区

加关注

