展开查看详情
1 .Tetrix Hardware Tips and Techniques
2 .Tetrix Kit Components Tetrix Hardware Lego Mindstorms NXT Education Kit Software (RobotC, NXT-G and LabView)
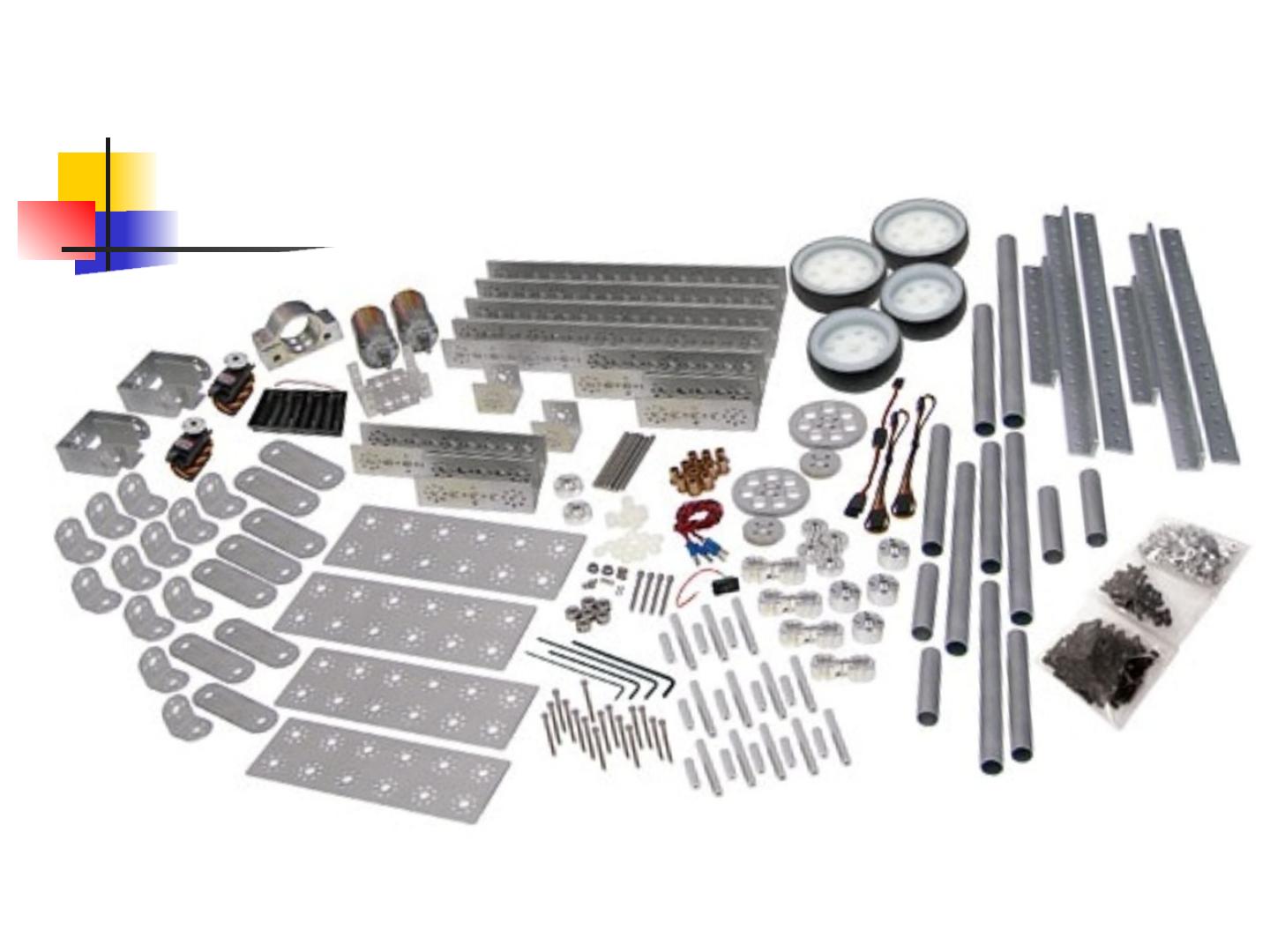
3 .Tetrix Hardware The Robot’s maximum dimensions at start of challenge: 18” W x 18” L x 18” H Tetrix kit (at registration): $900 $450 for returning teams Developed by Pitsco and LEGO Over 500 parts per kit Subset of the parts pictured here
5 .Tips and Techniques Advantages of the Tetrix Hardware Tools and such Arms and grabbing Connecting Lego pieces to Tetrix Extras you might need
6 .Advantages of the Hardware compared to Vex Tetrix system makes strong, rugged and robust robots Screws stay tight ! Grip screwheads with pliers
7 .Advantages of the Hardware compared to Vex Versatile hole patterns
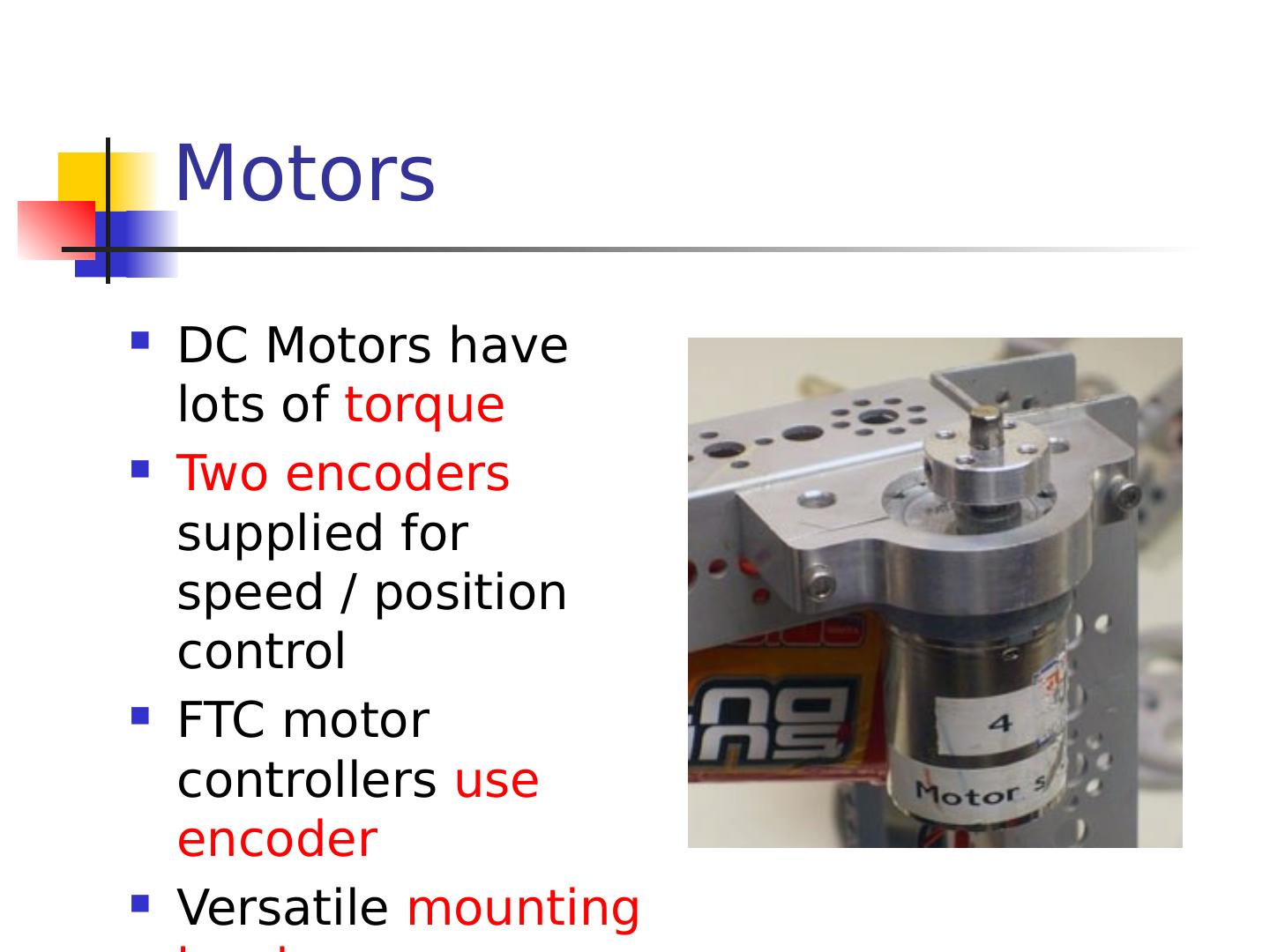
8 .Motors DC Motors have lots of torque Two encoders supplied for speed / position control FTC motor controllers use encoder Versatile mounting hardware
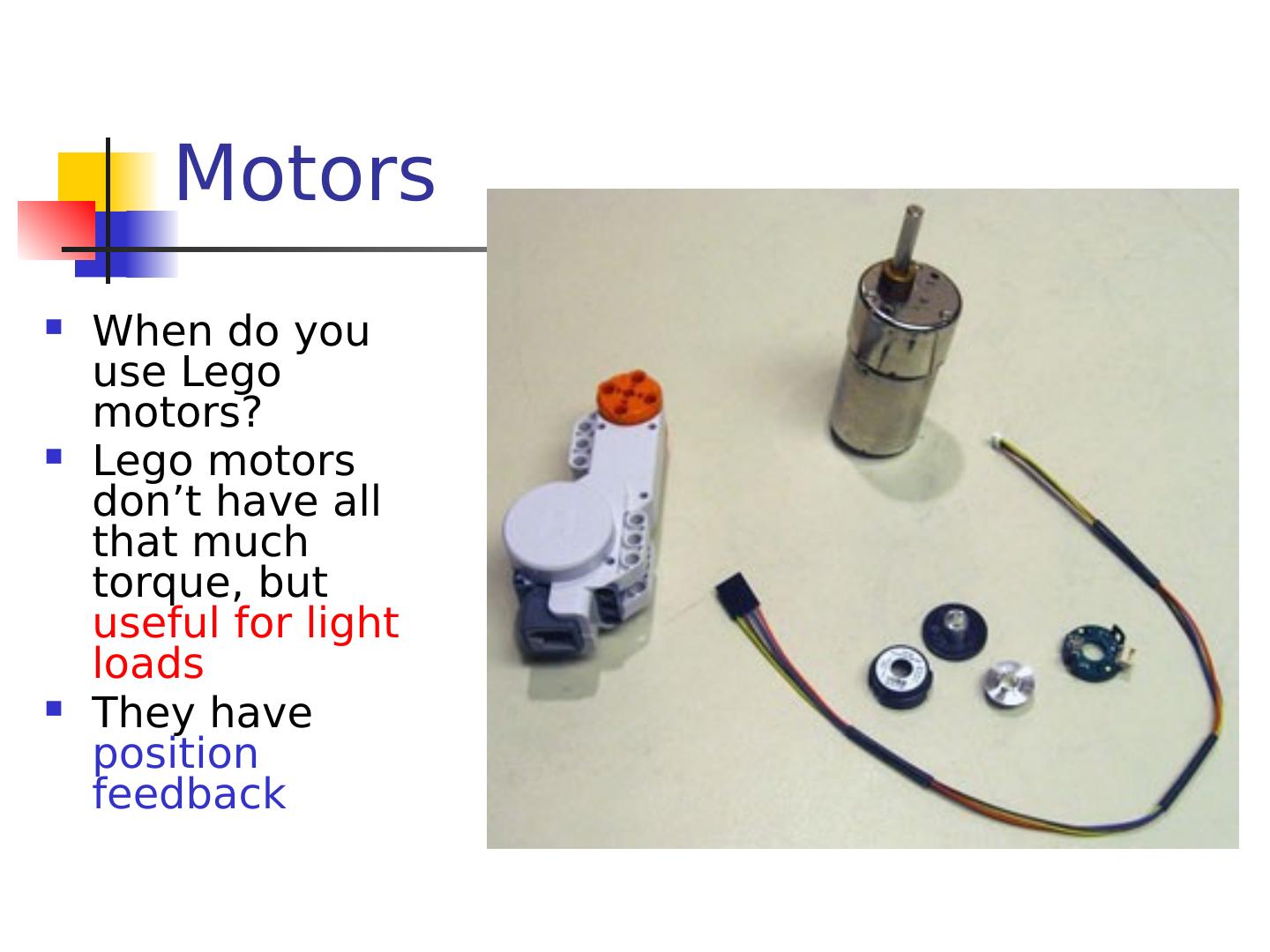
9 .Motors When do you use Lego motors? Lego motors don’t have all that much torque, but useful for light loads They have position feedback
10 .Motors and Gears While the Lego motors don’t have a lot of torque, there are lots of gears for them. There aren’t all that many aluminum gears and they are expensive - $20 - $30 each.
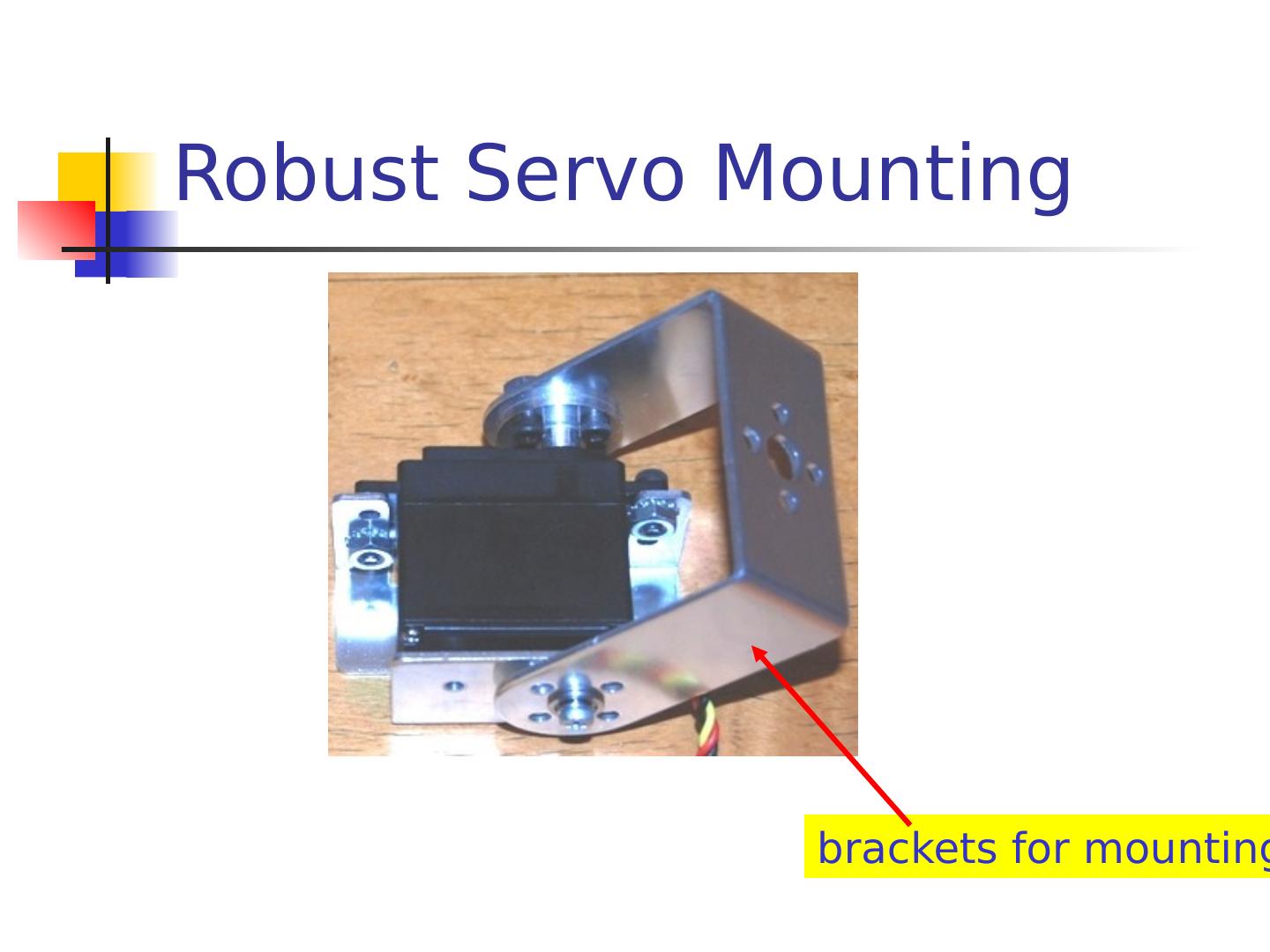
12 .Robust Servo Mounting brackets for mounting
13 .Servos Ways to use servos Single or double brackets for mounting Horn connected to gears, wheels, structural pieces Connect to end of pipe Be careful of order of assembly – think first, build second Warning – Picture in Tetrix Creator’s Guide shows washer on wrong side
14 .Servos Drive a robot arm with one or two servos , or use a servo on each side of a connected arm Requires use of Y connector Check form; there was a report of unreliable operation in this mode You must make sure center position of each servo is aligned when using two servos for a single drive Other Servo ideas… Specs: stall torque 61 oz. – in.
15 .Connecting Lego to Tetrix A connecting piece is provided to connect between Tetrix and Lego parts - use Lego beams with holes. Direct connection to Aluminum through Lego holes works.
16 .Tools, construction, and tips Long Allen wrenches are useful for reaching through holes
17 .Tools, construction, and tips It is always good to have more tools … Ball-end Allen wrenches, electric screwdriver
18 .Tools, construction, and tips The Pitsco store sells “ multi-nut pliers ”
19 .Battery management and electrical issues Shorts are catastrophic
20 .Battery management and electrical issues Stranded wire can cause shorts due to single strands escaping In the competition it is not allowed to solder wires or use heat-shrink tubing!
21 .Battery management and electrical issues Cable routing is important – cables are rather inflexible . It’s a good idea to attach the cable at the pivot point An extra battery is essential
22 .Battery management and electrical issues The controllers can be wired up in a daisy chain , in about any order. In competition: Only three controllers are allowed; the two with the kit and one additional , Additional controller can be servo or motor . Motor Controller Servo Controller Servo or Motor Controller NXT
23 .Battery management and electrical issues Wiring up the controllers is where caution is needed. There’s a real potential for shorts . With the servo controller, must ensure servos are connected in correct polarity . Four motors can be used with one motor controller by connecting motors in parallel.
24 .Battery management and electrical issues When using the encoders with the D.C. motors , must check the PID box in setup . Do Not have box checked if no encoders used . The encoders are very delicate and expensive …
25 .Battery management and electrical issues In the competition: Prototype board is the only place soldering is allowed (this remark is about the competition, this restriction in theory does not apply to this class). You can use any electrical or electronic component on this board. But – you can’t use any more power than is supplied by the I2C connector… (again, this is only for competition) You need to know how to connect components to a micro-computer chip. Pull-up resistors are usually needed – to 3.3V Caution – it’s easy to blow out this board! We will not use it if not absolutely necessary in this project.
26 .Pitfalls and Problems Sonar sensor is hard to use – it seems to be sometimes unpredictable. It seems like you cannot turn off it’s pinging, and it may be interfering with itself, or getting bogus reflections. If you could figure out how to write a driver for it, you might have better luck. There are drivers on WWW There is an Electro-Optical sensor that you can buy.
27 .Pitfalls and Problems Low center of gravity , long wheel base is good However, you might want to plan for a tip-over - or make the robot unable to tip over How do you recover from a tip-over?
28 .Pitfalls and Problems Unsupported servos can cause problems
29 .Pitfalls and Problems Use proper attachment techniques! In general, the guide recommends using ½” screws Other sizes used where small clearance needed.