展开查看详情
1 .WIFI SSID:Spark+AISummit | Password: UnifiedDataAnalytics
�
2 .Lessons Learned from Using Spark for
Evaluating Road Detection
@ BMW Autonomous Driving
Gheorghe Pucea, BMW Group
Jennifer Reinelt, BMW Group
#UnifiedDataAnalytics #SparkAISummit
�
3 .BMW AUTONOMOUS DRIVING
3
�
4 .Outline
• Evaluation of Lane Detection
• Evaluation Pipeline
• AI Based Ground Truth
• Lessons Learned
4
�
5 .BMW AUTONOMOUS DRIVING
Car Setup for
Autonomous Driving
5
�
6 .Outline
• Evaluation of Lane Detection
• Evaluation Pipeline
• AI Based Ground Truth
• Lessons Learned
6
�
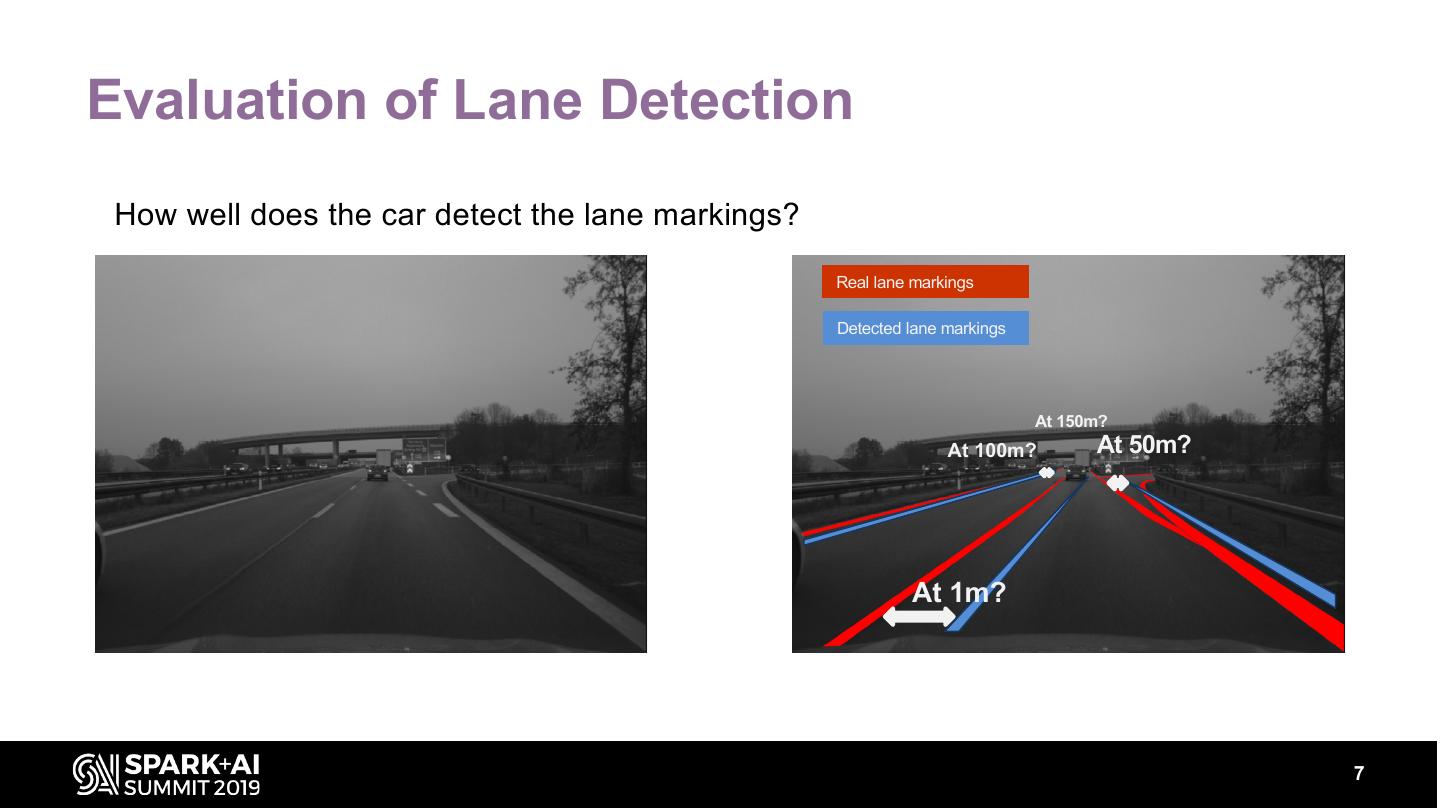
7 .Evaluation of Lane Detection
How well does the car detect the lane markings?
Real lane markings
Detected lane markings
At 150m?
At 100m? At 50m?
At 1m?
7
�
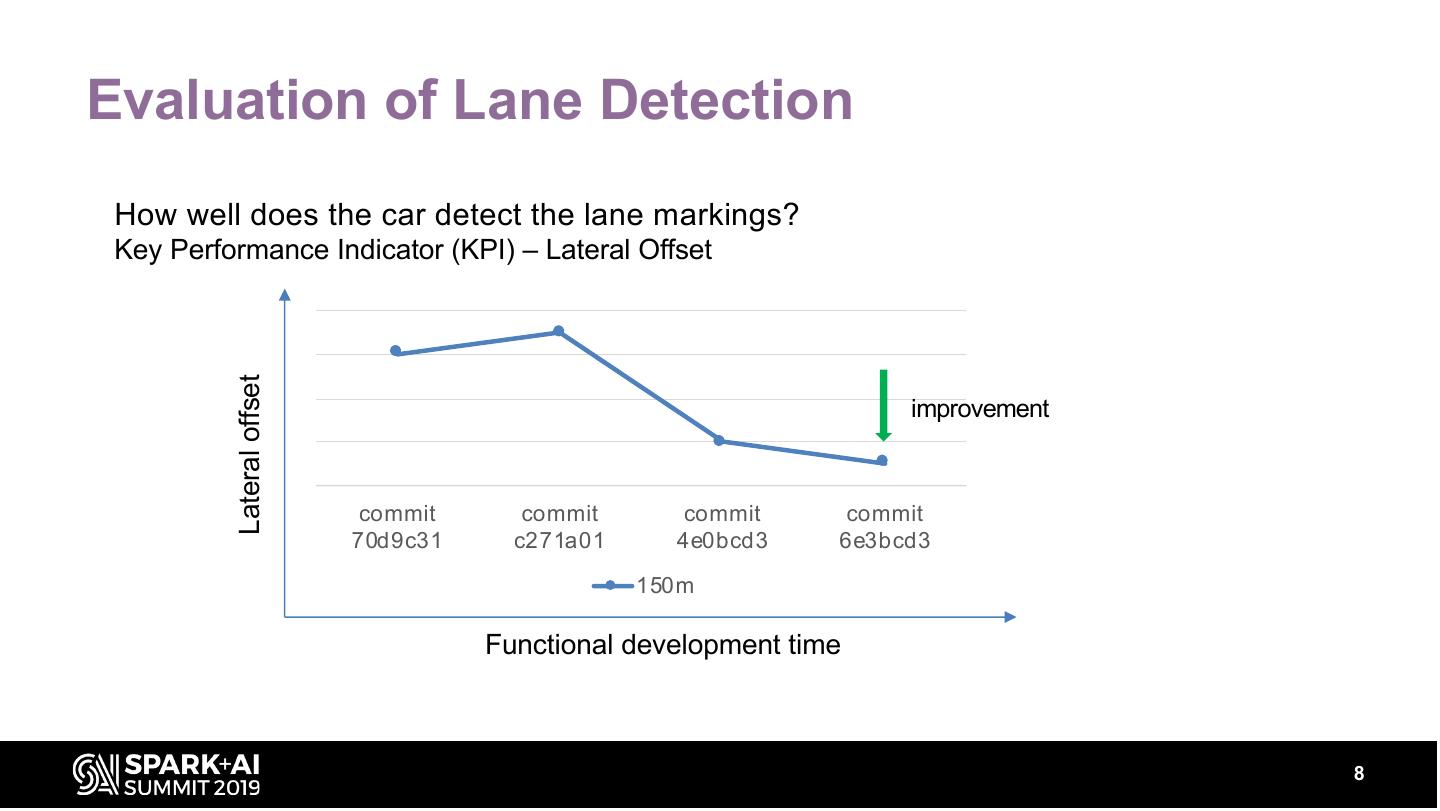
8 .Evaluation of Lane Detection
How well does the car detect the lane markings?
Key Performance Indicator (KPI) – Lateral Offset
Lateral offset
improvement
commit commit commit commit
70d9c31 c271a01 4e0bcd3 6e3bcd3
150m
Functional development time
8
�
9 .Evaluation of Lane Detection
Challenges:
• Where are the real lane markings? How do Real lane markings
we get the ground truth?
Detected lane markings
• How do we avoid making the same mistakes
as the car when looking for real lane At 150m?
markings? At 100m? At 50m?
• How do we scale this ground truth
generation?
At 1m?
9
�
10 .Evaluation of Lane Detection
How do we get the ground truth?
• From manual labels
Very accurate Manual
Slow
Expensive to
scale up
Bad for
Occlusions
10
�
11 .Evaluation of Lane Detection
How do we get the ground truth?
• From additional sensors
Automated Expensive to
Fast scale up
Accurate
11
�
12 .Evaluation of Lane Detection
How do we get the ground truth?
• Using sophisticated algorithms in the backend
Scalable Lower
accuracy
Automated
Fast
Cheap
12
�
13 .Outline
• Evaluation of Lane Detection
• Evaluation Pipeline
• AI Based Ground Truth
• Lessons Learned
13
�
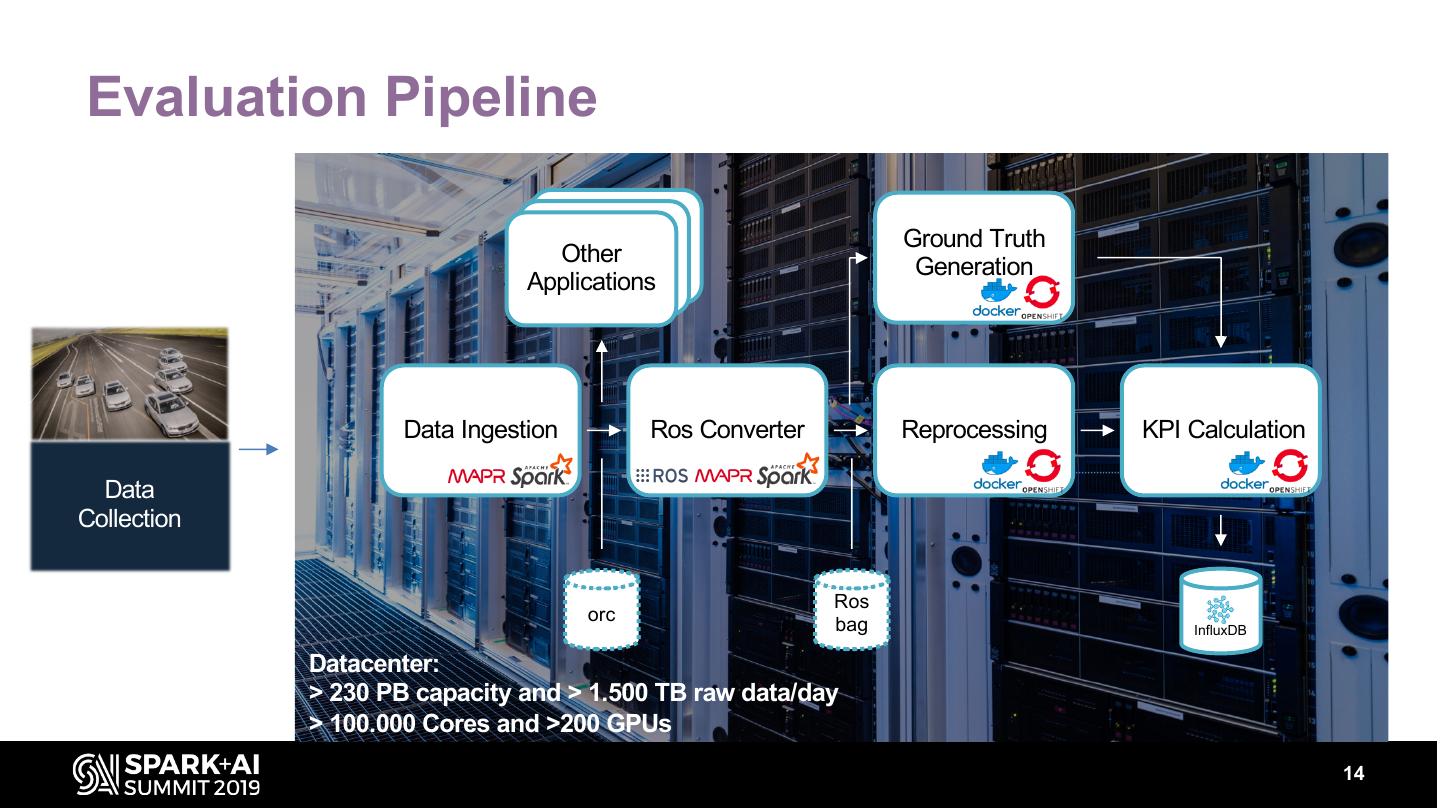
14 .Evaluation Pipeline
Other
Other Ground Truth
Other
Applications
Applications Generation
Applications
Data Ingestion Ros Converter Reprocessing KPI Calculation
Data
Collection
Ros
orc
bag InfluxDB
Datacenter:
> 230 PB capacity and > 1.500 TB raw data/day
> 100.000 Cores and >200 GPUs
14
�
15 .Outline
• Evaluation of Lane Detection
• Evaluation Pipeline
• AI Based Ground Truth
• Lessons Learned
15
�
16 .AI Based Ground Truth
Other
Other
Ground Truth
Applications
Other
Applications
Applications Generation
Data Ingestion Ros Converter Reprocessing KPI Calculation
Data
Collection
Ros
orc
bag InfluxDB
Datacenter:
> 230 PB capacity and > 1.500 TB raw data/day
> 100.000 Cores and >200 GPUs
16
�
17 .AI Based Ground Truth
3D Lidar points clouds Lidar intensity in Deep Neural Semantic
2D bird‘s eye view Network Segmentation
Lane Marking
No Lane Marking
17
�
18 .Outline
• Evaluation of Lane Detection
• Evaluation Pipeline
• AI Based Ground Truth
• Lessons Learned
18
�
19 .Motivation of Lessons Learned
Source: https://twitter.com/bigdataborat?lang=en
19
�
20 .Motivation of Lessons Learned
Source: https://papers.nips.cc/paper/5656-hidden-technical-debt-in-machine-learning-systems.pdf
20
�
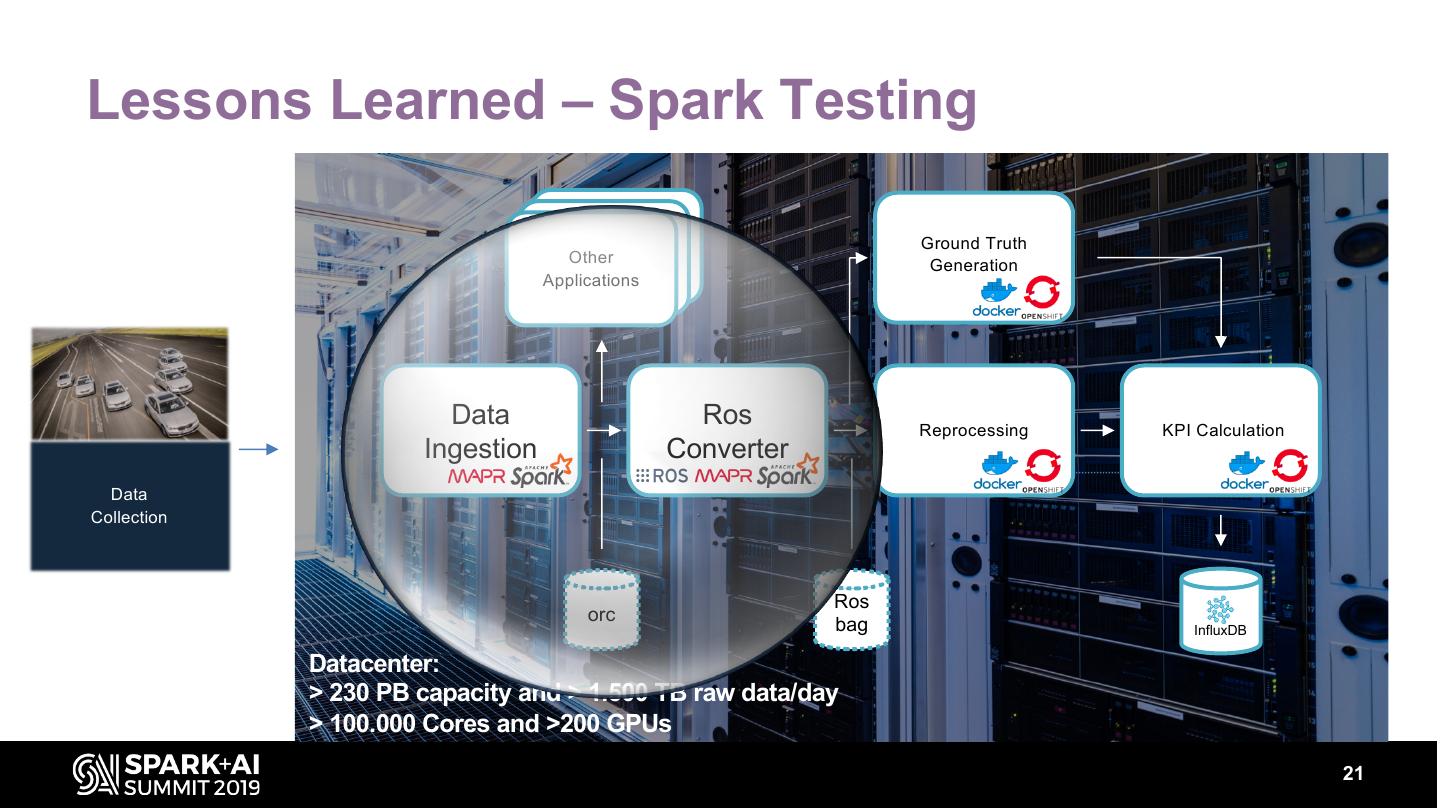
21 .Lessons Learned – Spark Testing
Other Ground Truth
Other
Applications
Other Generation
Applications
Applications
Data Ros Reprocessing KPI Calculation
Ingestion Converter
Data
Collection
Ros
orc
bag InfluxDB
Datacenter:
> 230 PB capacity and > 1.500 TB raw data/day
> 100.000 Cores and >200 GPUs
21
�
22 .Lessons Learned – Spark Testing
Typical integration test
22
�
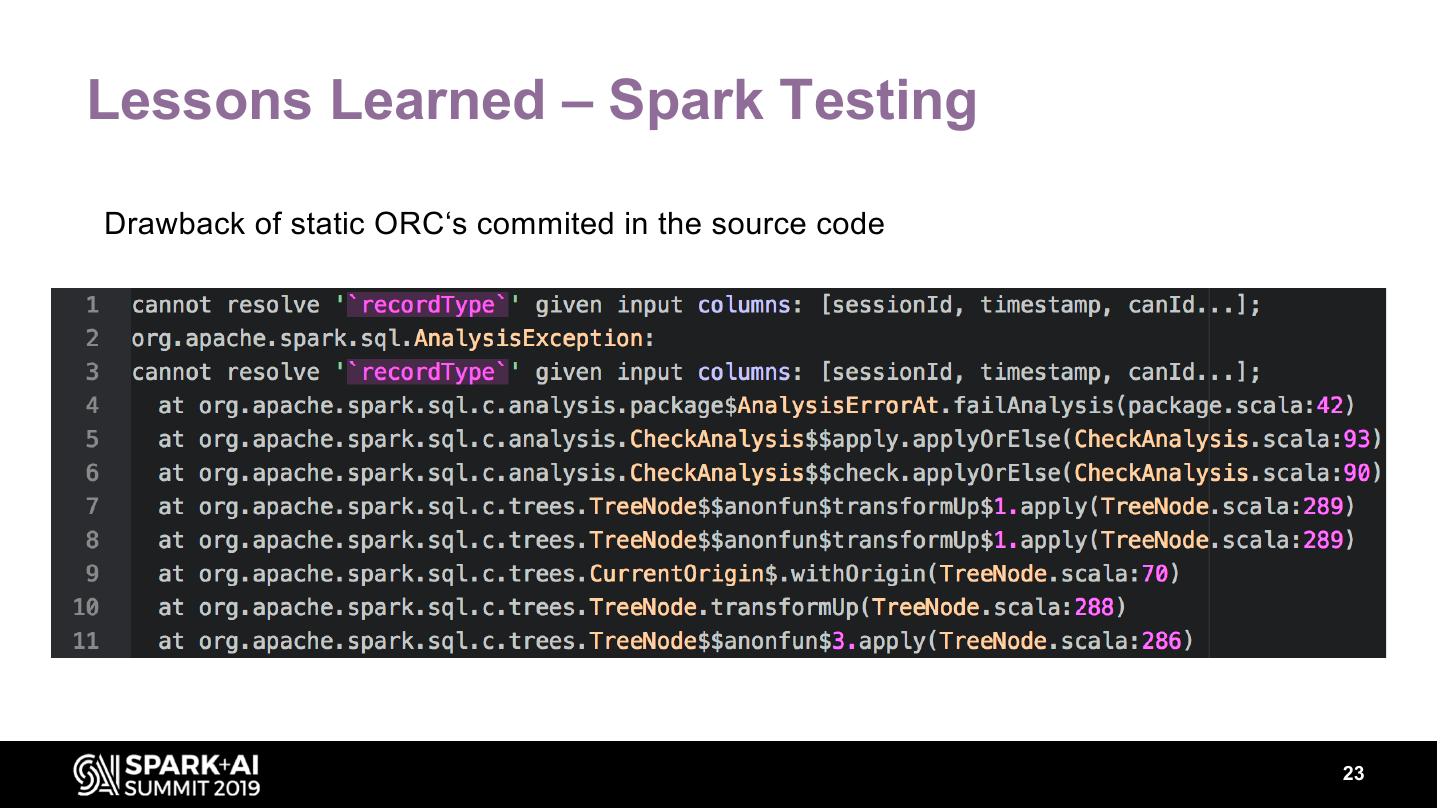
23 .Lessons Learned – Spark Testing
Drawback of static ORC‘s commited in the source code
23
�
24 .Lessons Learned – Spark Testing
Test data
generation
Type classes library
cats
24
�
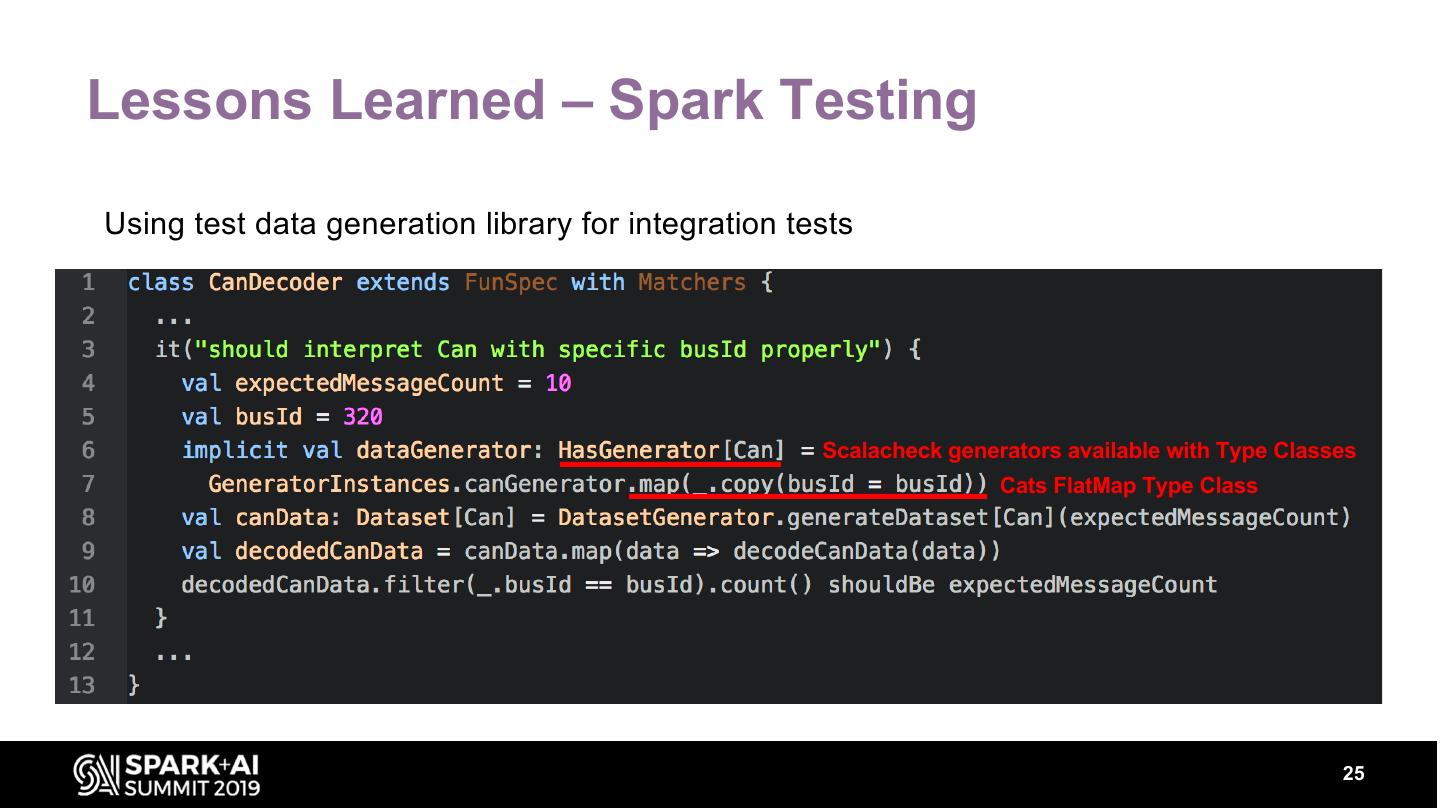
25 .Lessons Learned – Spark Testing
Using test data generation library for integration tests
Scalacheck generators available with Type Classes
Cats FlatMap Type Class
25
�
26 .Lessons Learned – Spark Testing
Sensor data streams as Scala ADT
26
�
27 .Lessons Learned – Spark Testing
Example Typeclass for generating Can Messages
27
�
28 .Lessons Learned – Spark Testing
Implemeting cats.FlatMap type class
28
�
29 .Lessons Learned – Testing
Advantages of using code instead of static Orc files
• Compiler helps with breaking changes
• Improves test understandability
• Flexible manipulation of data using monadic operations
29
�